機器人
概述
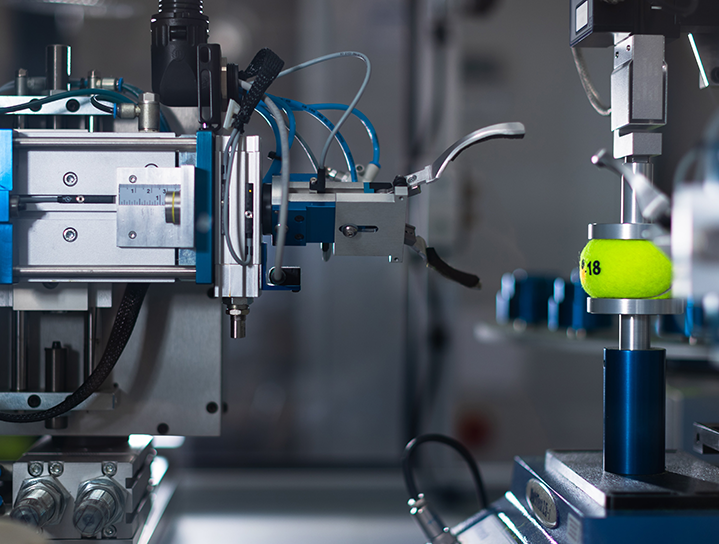
機器人具有感知、決策、執(zhí)行等基本特征,可以輔助甚至替代人類完成危險、繁重、復雜的工作,提高工作效率與質(zhì)量,服務(wù)人類生活,擴大或延伸人的活動及能力范圍。
機器人具有腦、手、腳等三要素的個體、同時具有非接觸傳感器(用眼、耳接受遠方信息)和接觸傳感器以及具有平衡覺和固有覺的傳感器。 使機器人能夠靠手進行作業(yè),靠腳實現(xiàn)移動,由腦來完成統(tǒng)一指揮的任務(wù)。非接觸傳感器和接觸傳感器相當于人的五官,使機器人能夠識別外界環(huán)境,而平衡覺和固有覺則是機器人感知本身狀態(tài)所不可缺少的傳感器,因此傳感器是機器人位置、方向和運動控制的關(guān)鍵部件。







您的個人信息
公司地址:浙江省嘉興市昌盛南路智慧產(chǎn)業(yè)創(chuàng)新園9號樓4層
公司電話:0573-89890066
關(guān)注我們


Copyright @ 2022 浙江銳鷹傳感技術(shù)股份有限公司 版權(quán)所有,并保留所有權(quán)利 技術(shù)支持